



Weit verbreitet in verschiedenen Bereichen
Marine
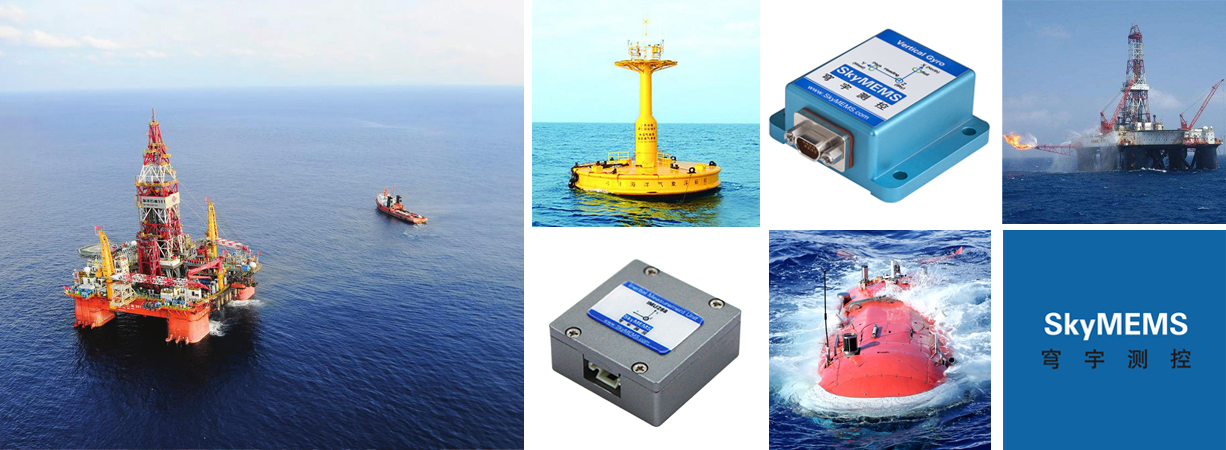
Stabilisierung von Meeresplattformen
Die Offshore-Exploration erfordert genaue und robuste Trägheitssysteme für die Stabilisierung von Plattformen sowie für die Positionierung, Ausrichtung und Überwachung der Schiffsausrüstung (Kran, Boje, Antenne und Kamera). Das Trägheitsnavigationssystem von SkyMEMS verwendet rauscharme MEMS-Gyroskope und -Beschleunigungsmesser sowie fortschrittliche Algorithmen zur Datenfusion. Die Produkte zeichnen sich durch ihre geringe Größe, hohe Genauigkeit und gute Anpassungsfähigkeit an Umgebungsbedingungen aus. Es liefert hochpräzise Drei-Achsen-Bewegungsinformationen für Überwachungssysteme von Offshore-Plattformen und wird häufig für die Erkennung der Stabilität von Offshore-Plattformen und Bootsbewegungen verwendet.
Gleichzeitig werden kostengünstige Lösungen für Bojen benötigt, die SkyMEMS's elektronischer Kompass wurde entwickelt und hergestellt, um eine kostengünstige Lösung zu bieten, und es kann Echtzeit-Roll-, Nick- und Kursinformationen liefern. Es ist eine ideale Wahl für Bojenanwendungen. SkyMEMS-Inertialmesssysteme zeichnen sich durch hohe Zuverlässigkeit in dynamischen Umgebungen aus, und wir bieten auch kundenspezifische Lösungen für spezifische Projekte.

Unbemanntes Schiff
Bei unbemannten Schiffen sind die Erkennungs- und Navigationsgeräte die Augen des Schiffes. Das Schiff muss sich bei der Steuerung und Ortung auf die von den Erkennungs- und Navigationsgeräten gesammelten Informationen verlassen. Die Navigationstechnologie spielt dabei eine entscheidende Rolle. Das SkyMEMS Trägheitsnavigationssystem (INS) und GNSS/INS integriertes Navigationssystem wird aufgrund seiner geringen Größe, seiner guten Anpassungsfähigkeit an die Umwelt und seiner hohen Präzision häufig für unbemannte Schiffsplattformen verwendet.
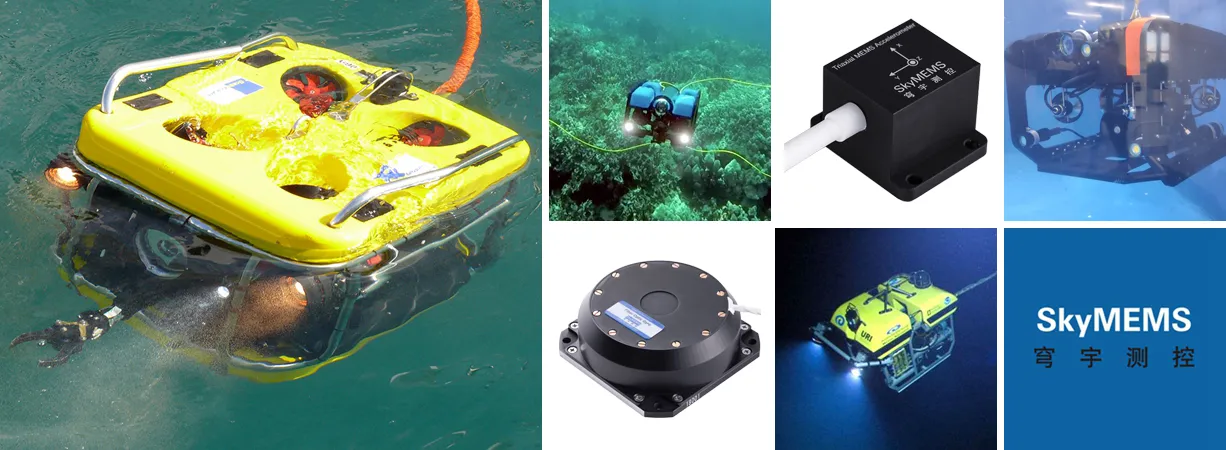
Unterwasser-Roboter
Unterwasserroboter sind eines der Mittel zur Erschließung der Ozeane, und präzise Navigationsfähigkeiten sind der Schlüssel für einen effektiven Einsatz und eine sichere Bergung von Unterwasserrobotern. Das Navigationssystem von Unterwasserrobotern muss genaue Positions-, Geschwindigkeits- und Lageinformationen über große Entfernungen und lange Zeiträume hinweg liefern. Aufgrund der Komplexität der Unterwasserumgebung, der Größe, des Gewichts, der Energie und der Unsichtbarkeit des Roboters selbst ist es jedoch nach wie vor eine schwierige Aufgabe, eine hochpräzise Unterwassernavigation zu erreichen. Das Trägheitsnavigationssystem und das faseroptische Gyroskop von SkyMEMS haben eine geringe Größe, eine hohe Genauigkeit und eine gute Anpassungsfähigkeit an die Umwelt und werden daher häufig in Unterwasserrobotern eingesetzt. Gleichzeitig kann SkyMEMS Kleinserienanpassungen an verschiedene Anwendungen vornehmen und den Kunden exklusive Lösungen anbieten.