



IMU688 UAV IMU aus China Fabrik ist ein High-Performance taktische Qualität MEMS Inertial Measurement Unit, ist es von 6 ° / h (10s Durchschnitt, feste Temperatur, Z-Achse) Bias-Stabilität MEMS-Gyroskop und 60ug (Allan) Bias-Stabilität MEMS-Beschleunigungsmesser, die präzise 3-Achsen-Ausgänge der Winkelgeschwindigkeit und 3-Achsen-Beschleunigung Daten ausgeben kann zusammengesetzt. Die IMU688 Trägheitsmesseinheit verwendet die neueste kapazitive Technologie und fortschrittliche MEMS-Komponenten, wodurch die Kosten erheblich gesenkt werden. Das System zeichnet sich durch seine geringe Größe und sein geringes Gewicht aus, es bietet eine Mil-Standard-Zuverlässigkeit und ist in einem ultra-robusten und kompakten Aluminiumgehäuse untergebracht. Die IMU688 findet breite Anwendung in der taktischen UAS-Navigation und -Steuerung, im Seeker, in der Plattformstabilisierung usw. 
Die IMU688 UAV IMU des chinesischen Herstellers ist ein hochleistungsfähiger 6 DoF MEMS-basierter Trägheitssensor, der in den folgenden Bereichen weit verbreitet ist:
- Taktische unbemannte Flugzeuge
- Sucher
- Stabilisierung der Plattform
- Ziel-Drohnen

Der typische IMU-Lieferant China IMU688 für autonome Fahrzeuge verfügt über einen Drei-Achsen-Beschleunigungsmesser und einen Drei-Achsen-Ratensensor. Die Inertialmesseinheit (IMU) ist ein Gerät, das die drei Komponenten der linearen Beschleunigung und die drei Komponenten der Drehrate eines Fahrzeugs (und damit seine sechs Freiheitsgrade) direkt misst. Eine IMU ist unter den Sensoren, die typischerweise in einem unbemannten Fahrzeug zu finden sind, einzigartig, da eine IMU keine Verbindung zur Außenwelt oder Kenntnisse über diese benötigt. Diese Umgebungsunabhängigkeit macht die IMU zu einer Kerntechnologie für Sicherheit und Sensorfusion. Eine genaue IMU kann auch die Fluglage präzise bestimmen und verfolgen. Beim Fahren ist die Richtung oder der Kurs des unbemannten Fahrzeugs ebenso wichtig wie seine Position. Wenn das unbemannte Fahrzeug auch nur kurzzeitig in eine falsche Richtung fährt, kann es auf die falsche Spur geraten. Die dynamische Steuerung des unbemannten Fahrzeugs erfordert Sensoren mit dynamischer Reaktion. Eine IMU ist gut geeignet, um dynamische Lage- und Positionsänderungen genau zu verfolgen. Dank ihrer völligen Umgebungsunabhängigkeit kann eine IMU die Position auch in schwierigen Situationen wie dem Rutschen und Schleudern verfolgen, wenn die Reifen die Bodenhaftung verlieren. IMU688 IMU-Module bieten eine zuverlässige Leistung mit guter Genauigkeit in dynamischen Umgebungen. Sie werden von führenden chinesischen Unternehmen in autonomen Fahrzeugen eingesetzt, und mittlerweile werden mehr als hunderttausend IMU688 IMU-Module in autonomen Fahrzeugen verwendet.
Die IMU688 China UAV IMU wurde von SkyMEMS entwickelt und produziert. Sie zeichnet sich durch hohe Leistung und Genauigkeit, hohe Zuverlässigkeit und einen wettbewerbsfähigen Preis aus und ist mit der ADIS16488 Schnittstelle und dem Protokoll kompatibel. Es ist eine taktische Trägheitsmesseinheit Sensor, der die wichtigsten folgenden Vorteile hat:

Die IMU688 Inertialmesseinheit ist eine präzise 6 DoF MEMS Inertialmesseinheit, die sich durch hervorragende technische Vorteile auszeichnet: - Präzise 6 DoF MEMS Trägheitsmesseinheit - Kompatibel mit ADIS16488 Schnittstelle und Protokoll - Dynamischer Bereich: Gyro ±450°/s, Acc ±16g - Bias-Stabilität: Gyro: 6°/h (GJB), Acc 0.06mg (Allan) - Fähigkeit zum Zugriff mit GNSS, Aerospcace Zuverlässigkeit - Full Temperature Range Accuracy: Built-in High Performance Temperature Calibration and Compensation Algorithm IMU688 Inertial Measurement Unit nimmt große Markenkomponenten, High-Class-Kleber Verkapselung, fortschrittliche Produktion Handwerk, und vollständig kalibriert, die sichergestellt, dass unsere Produkte haben echte tatsächliche präzise und perfekte Leistung.
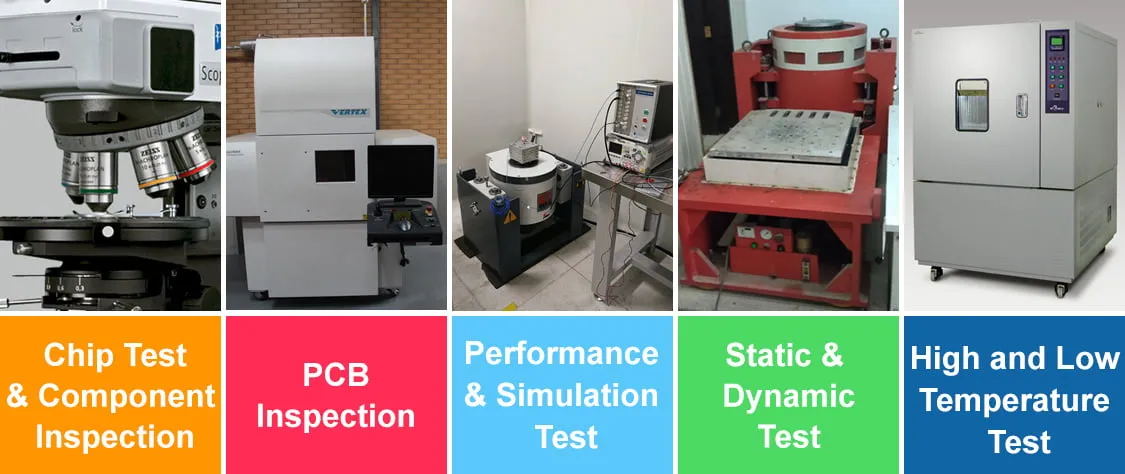
Wir verfügen über ein fortschrittliches Produkttestteam und Messgeräte, und wir betrachten die Qualität als das Leben des Unternehmens. Alle unsere Produkte müssen die strengsten Qualitätskontrollverfahren durchlaufen, und unsere einzigartige 12-stufige Qualitätskontrolle gewährleistet, dass unsere Produkte ein hohes Qualitätsniveau haben.
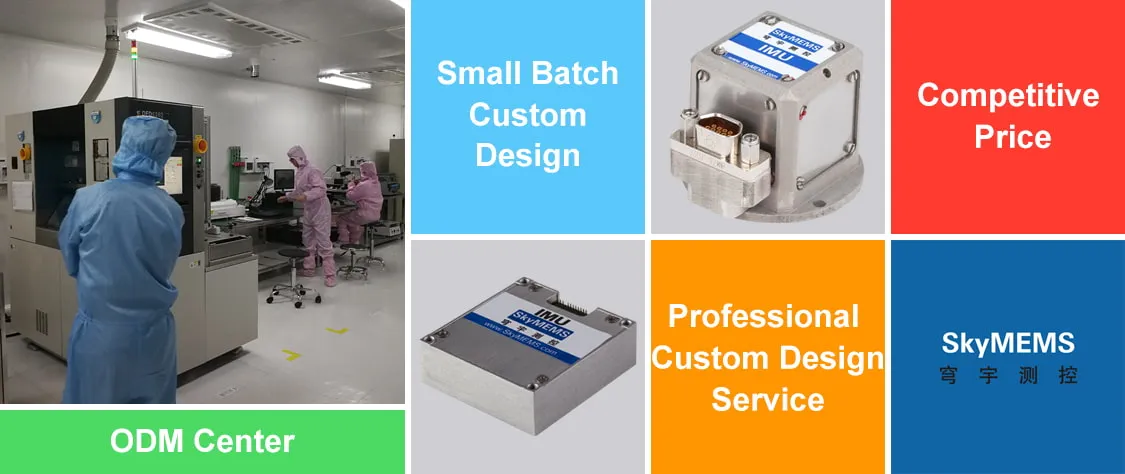
Dank strenger Kostenkontrolle und massiver Produktion können wir die wettbewerbsfähigsten und kostengünstigsten Preise anbieten. Außerdem verfügen wir über umfangreiche Erfahrungen im ODM-Service für Kunden in aller Welt, so dass wir eine langfristige Win-Win-Zusammenarbeit mit unseren Kunden aufbauen können.
Wir konzentrieren uns kontinuierlich auf MEMS-Mess- und -Regelungstechnologien und haben die fortschrittlichste Inertialmesseinheit IMU80 entwickelt. Die IMU688 findet breite Anwendung in der taktischen UAS-Navigation und -Steuerung, im Seeker, in der Plattformstabilisierung usw., und mittlerweile nutzen mehr als 200 Kunden auf der ganzen Welt unsere taktische IMU.

Wir verfügen über eine Produktionslinie von Weltklasse, um sicherzustellen, dass die Produktionsverfahren wissenschaftlich, präzise und normativ sind, was auch eine schnelle Lieferung unserer Produkte gewährleistet.

Wir verfügen über ein professionelles Team von Technikern, das 24 Stunden am Tag technischen Support und einen ausgezeichneten Kundendienst bieten kann. Kunden mit Herz zu dienen ist das Prinzip von SkyMEMS, die Kundennachfrage ist die grundlegende treibende Kraft unserer Entwicklung. Wir behandeln unsere Kunden mit Herz, die Zufriedenheit der Kunden ist die Richtung und das Ziel von SkyMEMS. Durch kontinuierliche technologische Innovation und Serviceverbesserung werden wir eine Win-Win-Zusammenarbeit mit unseren Kunden realisieren.
A: 1) IMU688 UAV IMU aus China Fabrik ist sehr ausgereift taktische Trägheitsmesseinheit, die weit in taktische unbemannte Flugzeuge, präzise gelenkte Bombe, Rakete, Seeker, Plattform-Stabilisierung, Ziel-Drohnen etc. seit vielen Jahren verwendet wurde, und jetzt die verkaufte Menge kann 10k pro Jahr erreichen 2) da wir IMU688 in großen Menge produzieren, so IMU688 IMU-Modul kann ultra-kostengünstig genießen, die versichern, dass es weit verbreitet sein kann. 3) IMU688 kann mit ADIS16488 kompatibel sein, und wir können eine schnellere Lieferung anbieten, normalerweise haben wir sie auf Lager, wir müssen nur die Tests vor der Lieferung machen. 4) Wir können kundenspezifisches Design für IMU-Module bieten, so dass das IMU-Modul besser für Ihre Anwendung geeignet ist, können wir die flexibelste Lösung für unsere Kunden bieten. 5) IMU688 IMU-Modul bieten die meisten Zuverlässigkeit, seine Qualität wurde von den führenden Unternehmen in China bewährt.
A: Vor der Kompensation der hohen und niedrigen Temperaturen und der Kalibrierung des Drehtischs haben wir den ESS 48 Stunden lang in der Hoch- und Tieftemperaturbox getestet, um die Umweltbelastung abzubauen und sicherzustellen, dass die Verformung so gering wie möglich ist. Aber nach einer langen Zeit, 10 Monate oder ein Jahr später, kann sich die Leistung aufgrund der Eigenschaften des MEMS-Sensors selbst kaum ändern. Wenn der Kunde zu diesem Zeitpunkt hohe Genauigkeitsanforderungen hat, kann er zur erneuten Kalibrierung in unser Werk zurückkehren.
A: Die Testtemperatur ist -40 bis 85 °, und die tatsächliche Temperatur kann 85 ° überschreiten, wenn die Prüfung hoher Temperatur. Tatsächlich, während des Tests, hielten wir IMU688 Aufenthalt bei beiden -40 ° und 85 ° für eine Stunde
A: IMUs arbeiten unter Verwendung von Referenzdaten, Vorspannungswerten von einem anfänglichen Startpunkt aus und berechnen Änderungen dieser Werte mithilfe ihrer integrierten Sensoren. Eine zentrale Verarbeitungseinheit berechnet die Richtungsinformationen: Position, Geschwindigkeit, Orientierung und Bewegungsrichtung zu einem bestimmten Zeitpunkt im Raum unter Verwendung der IMU. Die Sensoren leiden unter der Orientierungsdrift, da sie diese Variablen mit Hilfe eines Prozesses berechnen, der als Dead-Reckoning bekannt ist und kumulativen Fehlern unterworfen ist.
A: Die Koppelnavigation ist die Berechnung der aktuellen Position anhand eines zuvor ermittelten Standorts und der Weiterentwicklung dieser Position durch eine bekannte oder geschätzte Richtungsgeschwindigkeit über eine bestimmte Zeitspanne. Das Verfahren wurde erstmals in der Schiffsnavigation eingesetzt und beruhte auf manuellen Messungen. IMUs berechnen genaue Richtungsinformationen mithilfe integrierter Sensoren und arbeiten nach denselben Prinzipien. Orientierungsdrift ist die Ausbreitung von Orientierungsfehlern. Kleine Messfehler bei der Beschleunigung und der Winkelgeschwindigkeit führen zu größeren Fehlern bei der Geschwindigkeit, die sich zu noch größeren Fehlern bei der Position summieren. Die Orientierungsdrift, d. h. die Differenz zwischen der tatsächlichen Position und Orientierung und den gemessenen Werten, nimmt mit der Zeit zu, da sich die Messfehler summieren. IMUs enthalten in der Regel ein gewisses Maß an Kalibrierung, um die Orientierungsdrift zu kompensieren.
A: IMUs messen sechs Freiheitsgrade. Dazu gehört die Messung der linearen Bewegung über drei senkrechte Achsen (Schwanken, Heben und Wanken) sowie der Rotationsbewegung um drei senkrechte Achsen (Rollen, Nicken und Gieren). Daraus ergeben sich sechs unabhängige Messungen, die zusammen die Bewegung eines Objekts oder Fahrzeugs definieren.
A: Die IMU688 UAV IMU besteht aus mindestens zwei dedizierten Sensoren, einem oder mehreren linearen Beschleunigungssensoren und einem oder mehreren Gyroskopen oder Winkelbeschleunigungssensoren. Optional kann ein Magnetometer in das Gerät integriert werden, um eine Kalibrierung gegen Orientierungsabweichungen vorzunehmen. Beschleunigungsmesser erfassen die Richtung und den Betrag der Geschwindigkeitsänderung. Einfache Beschleunigungsmesser messen lineare Bewegungen, während biaxiale und triaxiale Beschleunigungsmesser eine Geschwindigkeitsänderung in einer Ebene bzw. im dreidimensionalen Raum erfassen. Die IMU verfügt über einen triaxialen (manchmal auch als Triade bezeichneten) Beschleunigungsmesser oder verwendet mehrere Beschleunigungsmesser, die an senkrechten Achsen ausgerichtet sind. Gyroskope erfassen die Winkelgeschwindigkeit oder die Ausrichtung um einen bestimmten Richtungsvektor. Die Winkelgeschwindigkeit ist relativ zu einer Bezugsfläche. Die IMU verwendet mehrachsige Kreisel, um Messungen in drei orthogonalen Richtungen vorzunehmen. Diese Winkelbewegungen müssen mit denen des Beschleunigungsmessers ausgerichtet werden.
A: für unser Standardmodell, wenn wir sie auf Lager haben, brauchen nur 2 ~ 3 Tage, um vor dem Versand erneut zu testen, wenn es nicht auf Lager ist, dann brauchen etwa 2 Wochen, um die Produktion und Tests zu arrangieren. Für die ODM elektronisches Produkt, wenn die Struktur zu ändern, wird es rund 3 ~ 4 Wochen brauchen, um die Produktion und Tests zu arrangieren.
A: über die Zahlung, zahlen Sie bitte auf unser Firmenkonto, der Name des Begünstigten: NANJING SKY MEMS TECHNOLOGY CO., LTD. Und unsere E-Mail ist nur @skymems.com, um mit u formell zu kontaktieren. Um dies zu beachten, um den Verlust zu vermeiden. 













