




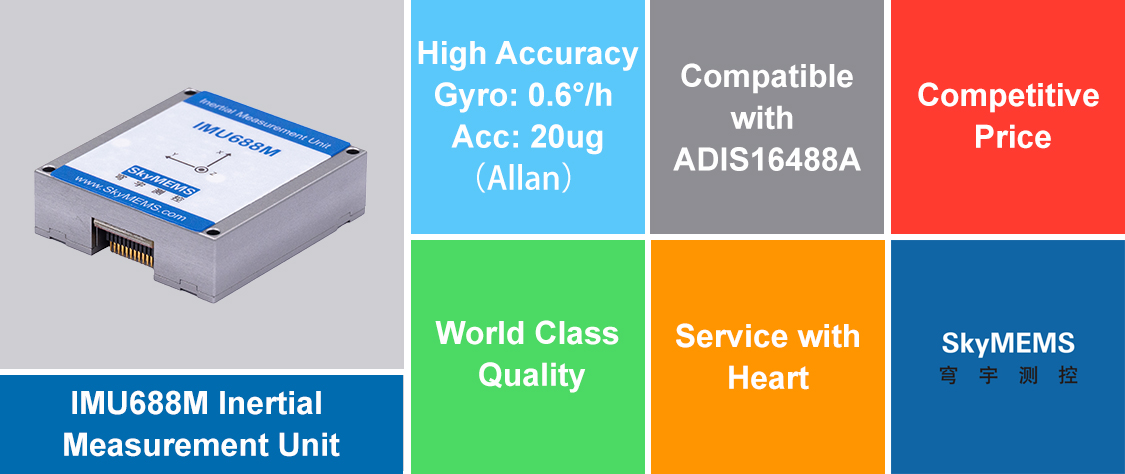
IMU688M is a high performance tactical grade MEMS Inertial Measurement Unit, which MEMS gyroscope enjoys 0.6°/h (Allan) bias instability and MEMS accelerometer enjoys 20µg (Allan) bias instability, and it can output precise 3 axis outputs of angular rate, 3 axis acceleration data, 3 axis magnetometer data, and barometer data, etc.
IMU688M adopts latest MEMS technology and advanced MEMS components, and IMU688M has been produced in bulk, which reduces the cost deeply. IMU688M enjoys excellent measurement performance, small size, light weight, and high reliability and robustness, it can output precise measurement data in harsh environment, and it has been widely applied in tactical unmanned aircraft, intelligent driving, surface vehicle, platform stabilization, industrial robotics, etc.
IMU688M Inertial Measurement Unit is a high performance 10 DoF MEMS-based inertial sensors, which has been widely used in the following fields:
– Unmanned Aircraft
– Intelligent Driving
– Unmanned Surface Vessel
– Platform Stabilization

IMU688M Inertial Measurement Unit widely used in unmanned aircraft
Inertial Measurement Unit (also name as IMU), is an electronic device that measures and reports acceleration, orientation, angular rates, and other gravitational forces. It is composed of 3 accelerometers, 3 gyroscopes, and other sensors also can be optional.
UAV is unmanned aerial vehicle, commonly known as a drone, is an aircraft without a human pilot aboard. The flight of UAVs may operate with various degrees of autonomy: either under remote control by a human operator or autonomously by onboard computers.
IMU688M UAV IMU is a tactical-grade MEMS-based IMU (inertial measurement unit), it is ideal for a range of critical UAV applications, including flight control, antenna stabilization, and navigation, and is also an essential component for inertial navigation systems (INS).
IMU688M UAV IMU provides reliable performance with good accuracy in dynamic environment, it has been widely used in unmanned aircraft by the Chinese leading companies, now more than tens of thousands IMU688M IMU modules are used in the unamend aircraft.

IMU688M Inertial Measurement Unit widely used in Autonomous Vehicles
The typical IMU for autonomous vehicles use includes a three-axis accelerometer and three-axis rate sensor. The inertial measurement unit (IMU) is a device that directly measures a vehicle’s three linear acceleration components and three rotational rate components (and thus its six degrees of freedom). An IMU is unique among the sensors typically found in an unmanned vehicle because an IMU needs no connection to or knowledge of the external world. This environment independence makes the IMU a core technology for both safety and sensor-fusion.
An accurate IMU can also determine and track attitude precisely. When driving, the direction or heading of the unmanned vehicle is as crucial as its position. Driving in a slightly wrong direction even briefly may put the unmanned vehicle in the wrong lane. Dynamic control of the unmanned vehicle requires sensors with dynamic response. An IMU does a nice job of tracking dynamic attitude and position changes accurately. Its fully environment-independent nature lets an IMU track position even in tricky scenarios such as slipping and skidding where tires lose traction.
IMU688M IMU modules provide reliable performance with good accuracy in dynamic environment, it has been widely used in autonomous vehicles by the Chinese leading companies, now more than hundreds of thousands IMU688M IMU modules are used in the autonomous vehicles.
Why Selecting IMU688M Inertial Measurement Unit?
IMU688M Inertial Measurement Unit is designed and produced by SkyMEMS, it enjoys high performance and accuracy, and high reliability with competitive price, which can be compatible with ADIS16488A interface and protocol. It is a tactical inertial measurement unit sensor, which has the main following advantages:

IMU688M Inertial Measurement Unit is a precision 10 DoF MEMS inertial measurement unit, which enjoys excellent technical advantages:
IMU688M Inertial Measurement Unit adopts big brand components, high-class glue encapsulation, advanced production craft, and fully calibrated, which assured that our products have real actual precise and perfect performance.
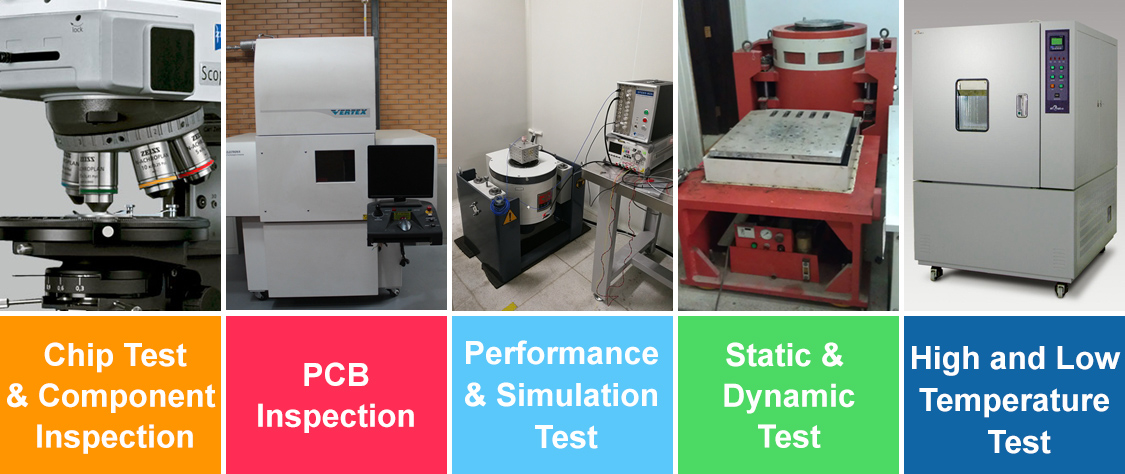
We have advanced product test team and measurement equipment, and we cherish the quality as the life of the company, all our products must pass the strictest quality control procedures, our unique 12-step quality control assures our products enjoy top level quality.

With strict cost control and massive production, we can provide the most competitive cost-effective prices, and we have abundant ODM service experience for customers around the world, that is why we can build up long term win-win cooperation with our customers.
We are continuously focusing on MEMS measurement & control technologies, and have developed the most advanced inertial measurement unit IMU688M. and IMU688M has been widely used in tactical UAS Navigation & Control, Seeker, Platform Stabilization, etc. and now more than 200 customers are using our tactical IMU around the world.

We have the world class production line to assure that the production procedures are scientific, precise, and normative, which also can assure our products to be fast delivered.

We have the professional technical support engineer team, which can provide 24-hour technical support and excellent after-sale service.
Serving customers with heart is the principle of SkyMEMS, Customer demand is the fundamental driving force of our development.
We treat our customers with heart, customers’ satisfaction is the direction and target of SkyMEMS. Through continuously technology innovation and service upgrading, we will realize win-win cooperation with customers.
Q: What is the Working Principle of IMU sensor?
A: IMUs operate by use of reference data, bias values from an initial starting point, and calculate changes to these values using its integrated sensors. A central processing unit calculates directional information; position, speed, orientation, and direction of movement, at a given time in space using the IMU. The sensors suffer from orientation drift as they calculate these variables using a process known as dead-reckoning and are subject to accumulative errors.
Q: What is Dead reckoning?
A: Dead reckoning is the calculation of current position by use of a previously determined location and the advancement of that position by a known or estimated directional speed over an elapsed time. The process was first used in marine navigation and relied upon manual measurements. IMUs calculate accurate directional information using integrated sensors and operate using these same principles.
Orientation drift is the propagation of orientation errors. Small measurement errors of acceleration and angular velocity produce larger errors in velocity that are compounded into even greater errors in position. Orientation drift, the difference between the actual position and orientation from the measured values, increases with respect to time as measurement errors are compounded. IMUs typically incorporate some amount of calibration in order to compensate for orientation drift.
Q: What are the Degrees of freedom of IMU sensor?
A: IMUs measure six degrees of freedom. This includes the measurement of linear motion over three perpendicular axes (surge, heave, and sway), as well as rotational movement about three perpendicular axes (roll, pitch, and yaw). This yields six independent measurements that together define the movement of an object or vehicle.
Q: What are the Sensor types that IMU sensor is composed of?
A: The IMU is comprised of at least two dedicated sensors, one or more linear accelerometers and one or more gyroscopes or angular accelerometers. An optional magnetometer may be integrated into the unit to calibrate against orientation drift.
Accelerometers detect the direction and magnitude of change in velocity. Simple accelerometers measure linear motion while biaxial and triaxial accelerometers detect a change in velocity over a plane or three-dimensional space, respectively. The IMU possesses a triaxial (sometimes referred to as a triad) accelerometer, or otherwise uses multiple accelerometers that are aligned across perpendicular axes.
Gyroscopes detect the angular rate or orientation about a given directional vector. The angular rate is relative to a reference surface. The IMU uses multi-axis gyros to provide measurements in three orthogonal directions. These angular movements must be aligned with those of the accelerometer.
Q: How about the delivery time?
A: for our standard model, if we have them in stock, only need 2~3days to re-test before shipping, if it is out of stock, then need around 2 weeks to arrange the production and tests. For the ODM electronic product, if needing to modify the structure, it will need around 3~4 weeks to arrange the production and tests.
Q: How to arrange the payment?
A: about the payment, please pay to our company account, the beneficiary’s name: NANJING SKY MEMS TECHNOLOGY CO., LTD. And our email is only @skymems.com to contact with u formally. To notice this to avoid the loss.
Q: Why does IMU688M Inertial Measuring Unit becomes so hot selling product?
A: 1) IMU688M Inertial Measuring Unit is very mature inertial measurement unit, which has been widely used in Unmanned Aircraft, Seeker, Platform Stabilization etc. for many years, and now the sold qty can reach 10k per year
2) since we produce IMU688M in big qty, so IMU688M IMU module can enjoy ultra-cost-effective, which assure that it can be widely used.
3) IMU688M can be compatible with ADIS16488A, so you can use IMU688M easily to replace the ADIS16488A without any changing, and we can provide faster delivery, usually we have them in stock, we only need to do the tests before delivery.
4) we can provide customized design for IMU modules, so that make the IMU module more suitable for your application, we can provide the most flexible solution to our customers.
5) IMU688M IMU module provide the most reliability, its quality has been proven by the leading companies in China.
Q: Whether the IMU688M’s SPI sampling rate can be settable?
A: yes, we can, the IMU688M SPI sampling rate can reach to 2000Hz, if you want to set it as 100Hz or other frequency, please let us know, we can set it here in our factory.
Q: Whether SkyMEMS can provide ODM service based on IMU688M module?
A: yes, we can, if you want bigger accelerometer’s range, we can design, such as ±40g, or other range, and also MEMS gyro also can be selected, we can design the IMU based on your actual application, and also optimize our algorithms to make it right suitable for your application. While the size and shape may be changed according to your actual applications.
Q: How to keep IMU688M bias calibration good after time? What a procedure?
A: In fact, before we do the high and low temperature compensation and turntable calibration, we have done ESS in the high and low temperature box for 48 hours to release the environmental stress and ensure that the stress deformation is as small as possible. But after a long time, 10 months or a year later, due to the characteristics of the MEMS sensor itself, the performance may have little change. At this time, if the customer has high accuracy requirement, they can return to our factory for calibration again.
Q: What is an IMU sensor?
A: An inertial measurement unit (IMU) is an electronic device that measures and reports a body’s specific force, angular rate, and sometimes the magnetic field surrounding the body, using a combination of accelerometers and gyroscopes, sometimes also magnetometers.
Q: What does inertial measurement unit measure?
A: Inertial Measurement Units (IMUs) is a self-contained system that measures linear and angular motion usually with a triad of gyroscopes and triad of accelerometers. An IMU can either be gimballed or strapdown, outputting the integrating quantities of angular velocity and acceleration in the sensor/body frame.
Q: What is the Terms Definition for Navigation?
A: Inertia is the property of bodies to maintain constant translational and rotational velocity, unless disturbed by forces or torques, respectively (Newton’s first law of motion).
An inertial reference frame is a coordinate frame in which Newton’s laws of motion are valid. Inertial reference frames are neither rotating nor accelerating.
Inertial sensors measure rotation rate and acceleration, both of which are vector‐ valued variables.
Gyroscopes are sensors for measuring rotation: rate gyroscopes measure rotation rate, and integrating gyroscopes (also called whole‐angle gyroscopes) measure rotation angle.
Accelerometers are sensors for measuring acceleration. However, accelerometers
Cannot measure gravitational acceleration. That is, an accelerometer in free fall (or in orbit) has no detectable input.
The input axis of an inertial sensor defines which vector component it measures.
Multi‐axis sensors measure more than one component.
An inertial measurement unit (IMU) or inertial reference unit (IRU) contains a cluster of sensors: accelerometers (three or more, but usually three) and gyroscopes (three or more, but usually three). These sensors are rigidly mounted to a common base to maintain the same relative orientation.
Q: What is Basic principle of inertial navigation?
A: the ability to measure the acceleration of vehicle it would be possible to calculate the change in velocity and position by performing successive mathematical integrations of the acceleration with respect to time.
In order to navigate with respect to our inertial reference frame, it is necessary to keep track of the direction in which the accelerometers are pointing.
Rotational motion of the body with respect to inertial reference frame may be sensed using gyroscopic sensors that are used to always determine the orientation of the accelerometers. Given this information it is possible to resolve the accelerations into the reference frame before the integration process takes place.
Q: What is the Relation to guidance and control?
A: Navigation is concerned with determining where you are relative to where you want to be.
Guidance is concerned with getting yourself to your destination.
Control is concerned with staying on track.
There has been quite a bit of synergism among these disciplines, especially in the development of missile technologies where all three could use a common set of sensors, computing resources, and engineering talent. Therefore, the history of development of inertial navigation technology has a lot of overlap with that of guidance and control.
Q: What is Aircraft Axes Definition?
A: The three axes of the aircraft are:
The roll axis which is roughly parallel to the line joining the nose and the tail
Positive angle: right wing down
The pitch axis which is roughly parallel to the line joining the wingtips
Positive angle: nose up
The yaw axis is vertical
Positive angle: nose to the right
Q: whether the connector and cable length can be selected?
A: yes, no problem, please let us know the connector type and cable length you want, then we can do it.














